https://medium.com/@jonathan_hui/understanding-feature-pyramid-networks-for-object-detection-fpn-45b227b9106c
we create a pyramid of feature and use them for object detection (the right diagram).
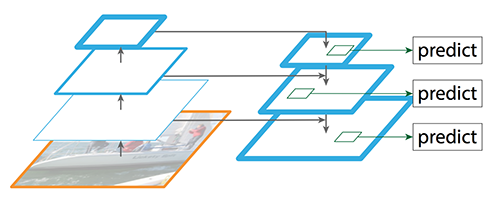
FPN composes of a bottom-up and a top-down pathway. The bottom-up pathway is the usual convolutional network for feature extraction. As we go up, the spatial resolution decreases. With more high-level structures detected, the semantic value for each layer increases.
SSD makes detection from multiple feature maps. However, the bottom layers are not selected for object detection. They are in high resolution but the semantic value is not high enough to justify its use as the speed slow-down is significant. So SSD only uses upper layers for detection and therefore performs much worse for small objects.
FPN provides a top-down pathway to construct higher resolution layers from a semantic rich layer.
Top-down pathway
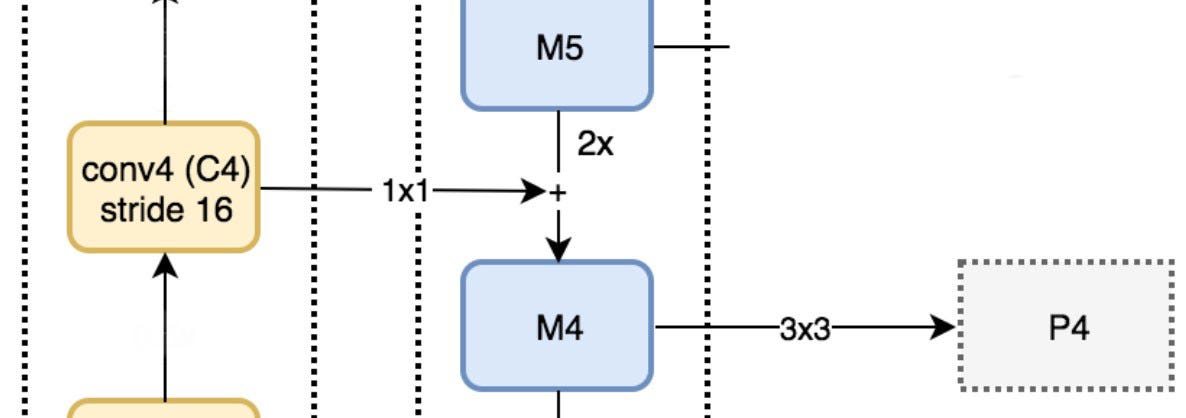
We apply a 1 × 1 convolution filter to reduce C5 channel depth to 256-d to create M5. This becomes the first feature map layer used for object prediction.
As we go down the top-down path, we upsample the previous layer by 2 using nearest neighbors upsampling. We again apply a 1 × 1 convolution to the corresponding feature maps in the bottom-up pathway. Then we add them element-wise. We apply a 3 × 3 convolution to all merged layers. This filter reduces the aliasing effect when merged with the upsampled layer.
 We repeat the same process for P3 and P2. However, we stop at P2 because the spatial dimension of C1 is too large. Otherwise, it will slow down the process too much. Because we share the same classifier and box regressor of every output feature maps, all pyramid feature maps (P5, P4, P3 and P2) have 256-d output channels.
We repeat the same process for P3 and P2. However, we stop at P2 because the spatial dimension of C1 is too large. Otherwise, it will slow down the process too much. Because we share the same classifier and box regressor of every output feature maps, all pyramid feature maps (P5, P4, P3 and P2) have 256-d output channels.